
Підписуйтеся на наш телеграм канал!

Вчені створили робота птаха, який живиться сонячною енергією
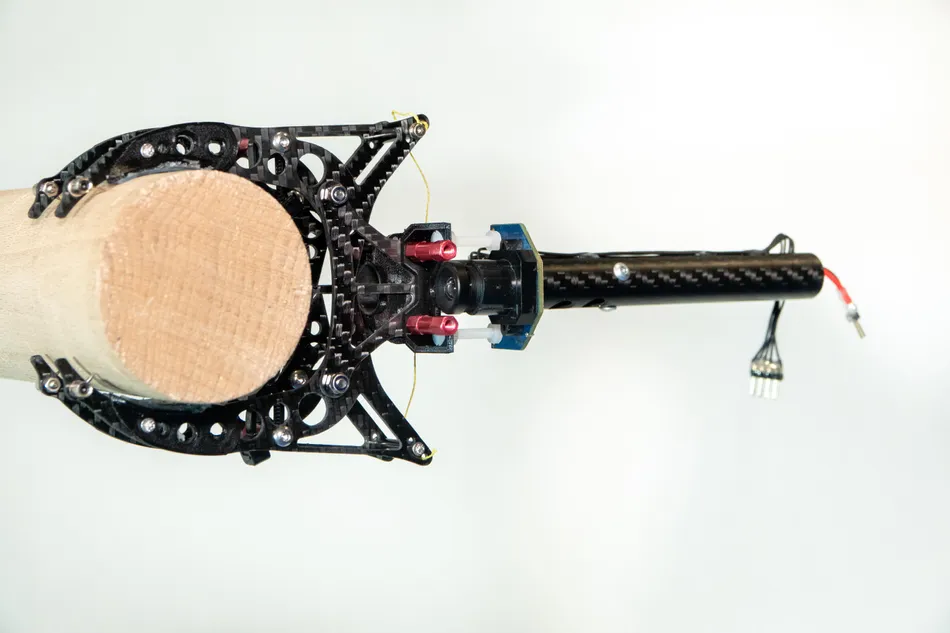
Дослідники EPFL (Федеральної політехнічної школи Лозанни, Швейцарія) створили орнітоптера — робота-птаха, який може самостійно приземлятися на горизонтальні опори без допомоги людини. Проєкт GRIFFIN направлений на розробку коптерів із «лапками як у птахів». Для цього 700-грамовий пристрій оснастили бортовим комп’ютером і навігаційною системою. Спеціальну лапу точно відкалібрували, щоб компенсувати амплітудні коливання під час польоту.
Важливість розробки полягає в тому, що під час приземлення та нетривалої зупинки у природному середовищі такі коптери зможуть заряджатись від сонячної енергії, а отже — збільшувати дальність своїх польотів. Науковці EPFL підкреслюють: птах, який приземляється на гілку, робить маневр, який видається дуже простим, але насправді це симбіоз балансу, точності, осягання траєкторії та швидкості. Це настільки складний рух, що досі жоден крилатий коптер (орнітоптер) не міг його освоїти.
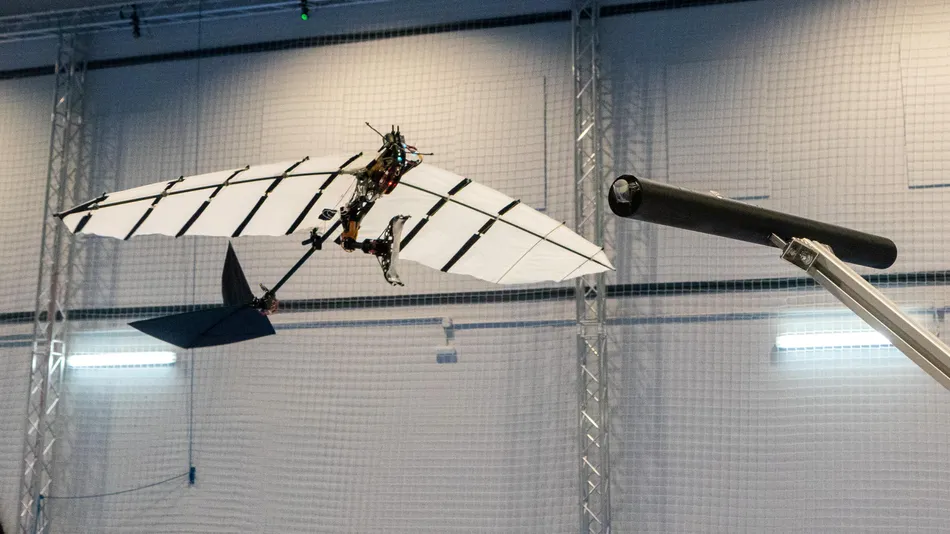
Рафаель Цуффрі, докторант Лабораторії інтелектуальних систем і біороботики EPFL, вперше описав унікальне шасі, яке дозволяє орнікоптеру імітувати сідання птаха на гілку. Він побудував і випробував його у співпраці з колегами з Університету Севільї (Іспанія), там й провелися перші випробовування проекту GRIFFIN.
«Це перша фаза більшого проекту. Коли орнітоптер самостійно приземлиться на гілку дерева у природному середовищі, він зможе виконувати й інші завдання — наприклад непомітно збирати біологічні зразки або проводити вимірювання. Зрештою, він може навіть приземлитися на штучні структури, а це може відкрити нові сфери застосування дрона», — підкреслив Цуффрі.

Вчений додав, що здатність ефективно приземлятися на «лапу» та зберігання балансу робить орнікоптер кращим за більшість БПЛА. «Це великий крок у напрямку використання роботів із махаючими крилами для розвідки, військових маніпуляцій та інших реальних застосувань у перспективі», — підкреслив Цуффрі.
Експерименти на цей час проводяться в закритих приміщеннях, оскільки вчені намагаються контролювати зону польоту коптера та траєкторію руху. Науковці хочуть вдосконалити систему розпізнавання місцевості, щоби орнікоптер у майбутньому міг самостійно маневрувати та приймати рішення не лише природному середовищі на відкритому повітрі, але й на непередбачуваних рельєфах.
Зазначимо, що це далеко не перша інновація від EPFL. Раніше швейцарські науковці створили «м’яких» роботів на базі методу виробництва оптичних волокон. Технологія первинно призначена для точкового доставляння необхідних ліків в організм людини. За словами вчених, система «дивовижно проста у виробництві» і може застосовуватися для будь-якого експериментального дослідження — немає значення, чи це людське тіло, чи тестування ортопедичних пристосувань, чи виробництво протезів або ж промислових роботів.