
Підписуйтеся на наш телеграм канал!

Науковці розробили мікророботів, які можуть рухатися за допомогою звуку
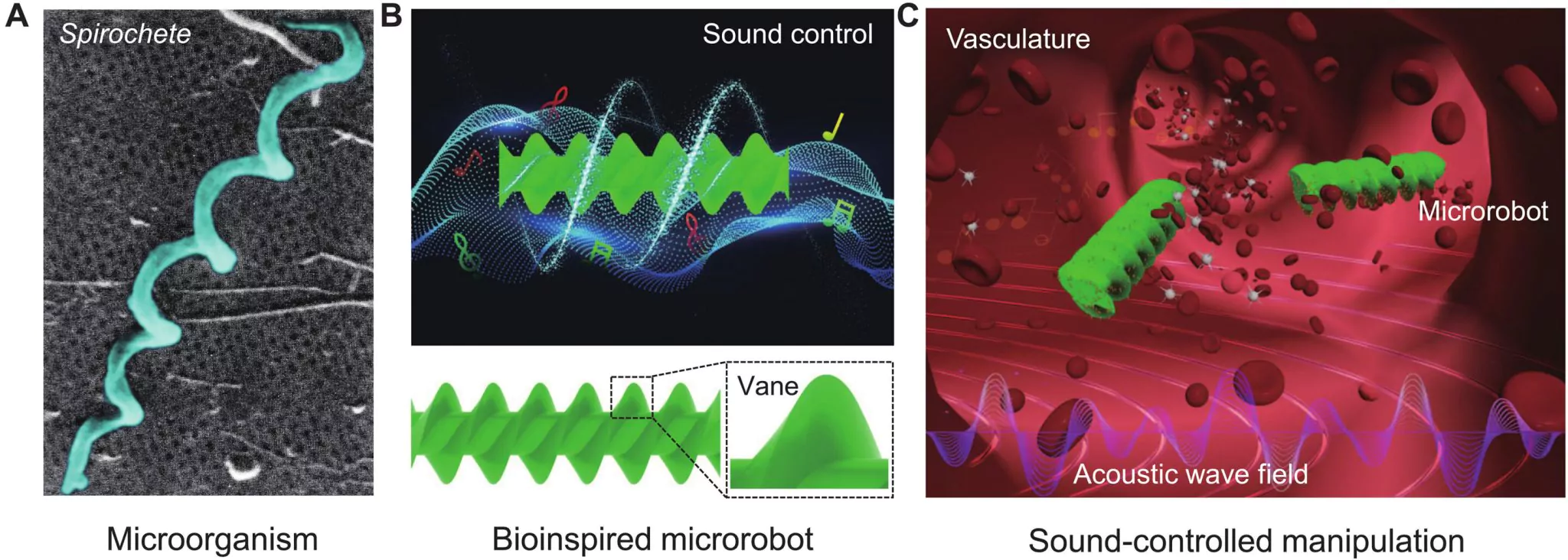
Інженери з Німеччини та Швейцарії розробили мікроробота з акустичним керуванням. Пристрій вловлює коливання зовнішнього звукового поля і рухається вузькими трубками. Технологію можна адаптувати для доставки ліків з кровоносних судин та проведення неінвазивних операцій.
Дослідники запозичили ідею для управління рухами роботи у бактерій спірохетів. Клітини цих мікроорганізмів закручені у формі спіралі. Повертаючись у в’язкій рідині, бактерії здійснюють поступальні рухи.
Інженери спроектували мікророботів, які використовують той же принцип руху. Вчені надрукували на 3D-принтері шматочок нетоксичного полімеру у формі штопора завдовжки 350 мкм та діаметром 100 мкм. Вони помістили пристрій у скляну трубку, наповнену водою. Під впливом зовнішнього акустичного поля молекули рідини вібрують, створюючи вихор, який штовхає робота вперед.
У серії експериментів вчені продемонстрували, що, змінюючи властивості звукових хвиль, можна керувати швидкістю та напрямком рухів робота. Мікроробот реагує на звукові стимули частотою від 12 до 19 кГц. При цьому, якщо збільшити частоту звукових коливань, робот рухатиметься вгору всередині труби, нахиленої під кутом 45°.
Дослідники з різних країн працюють над створенням різних систем для таргетованої доставки ліків. Поширене рішення — мікророботи, які керуються за допомогою магнітного поля. Хоча такий підхід показав себе багатообіцяючим, він має проблеми та обмеження: складне виробництво та громіздке обладнання для управління. Інженери розглядають роботів, керованих за допомогою звуку, як просте альтернативне рішення.
Нагадаємо — наприкінці травня вчені зі США розробили мініатюрних роботів, здатних доставляти медикаменти прямо в уражений орган. За основу були взяті біологічні «плавці» — бактерії та сперматозоїди з нелінійним характером руху. Мікророботи, виготовлені з біосумісних полімерів, мають сферичну порожнину всередині. Пристрої вібрують та переміщаються. Роботи також мають асиметричні плавці, що змушують їх обертатися по орбіті. Механізм вже протестували на сечовому міхурі лабораторної миші.