
Підписуйтеся на наш телеграм канал!
Штучний інтелект переміг людей у змаганні дронів
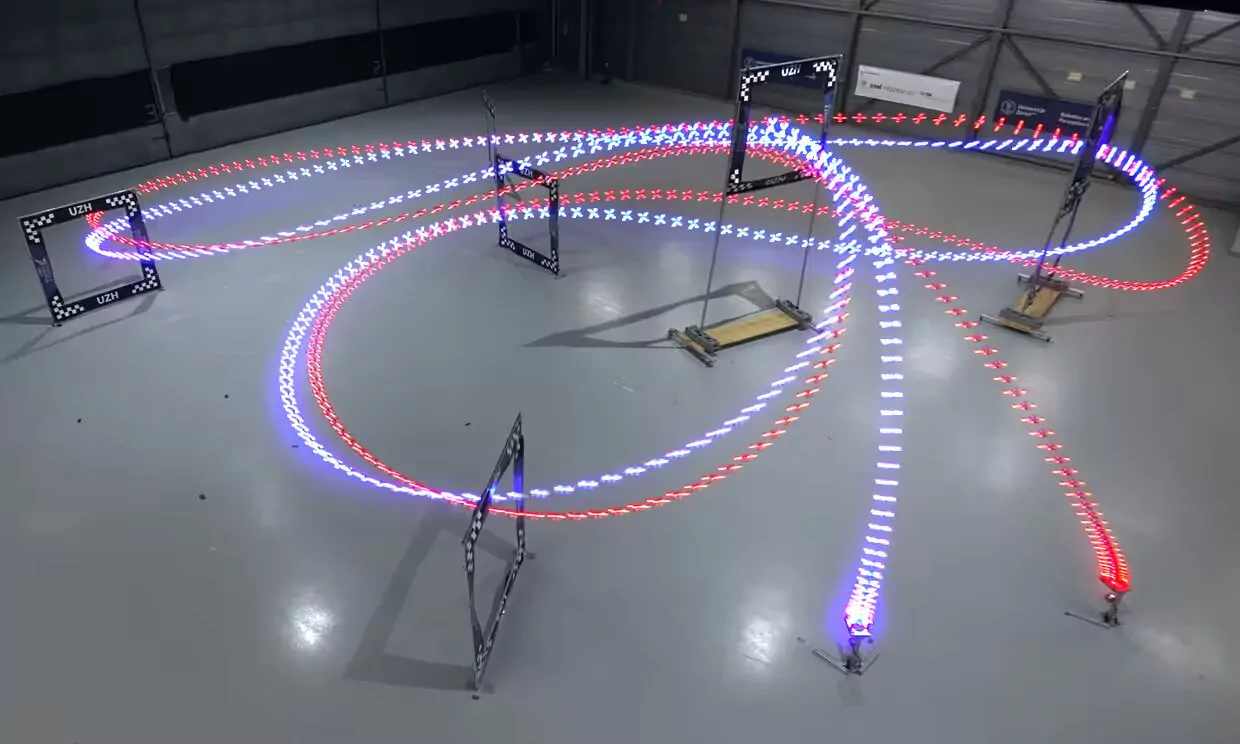
Інженери Цюрихського університету (Швейцарія) розробили алгоритм штучного інтелекту Swift, призначений для керування дронами. Змагаючись із чемпіонами світу в цій дисципліні, платформа перемогла в 15 перегонах з 25 і показала найкращий час на трасі, де дрони розганяються до 80 км/год.
Перегони дронів з видом від першої особи (FPV) — це змагання зі швидкісного прольоту БПЛА за маршрутом з воротами, через які потрібно пролетіти і уникнути катастрофи. Оператори орієнтуються на зображення з камери, встановленої на дроні. У ході випробувань система Swift змагалася з трьома чемпіонами у пілотуванні БПЛА: Томасом Бітматтою, Марвіном Шеппером та Алексом Вановером. Перед основними заїздами вони мали тиждень, щоб попрактикуватися в проходженні траси, а Swift AI тренувався в симуляції, де була відтворена віртуальна копія траси.
При роботі з ШІ використовувалося глибоке навчання з підкріпленням (deep reinforcement learning) — спосіб, заснований на методі проб та помилок: під час тренування дрон падав кілька сотень разів, але в умовах симуляції це не склало проблем. Під час перегонів дані з камери передавали нейромережі, яка допомагала виявити ворота на трасі. Ця інформація доповнювалася показаннями датчика інерції, який допомагав оцінити становище, орієнтацію та швидкість дрона — спільний потік транслювався в іншу нейромережу, а вона вже ухвалювала рішення та віддавала дрону команди.
Аналіз гонок показав, що Swift був завжди швидше за людину на старті і виконував крутіші повороти, ніж оператори-люди. Але непереможним ШІ не став — він програв 40% перегонів, БПЛА кілька разів падав. Система ймовірно виявилася чутливою до зовнішніх умов, наприклад, освітлення. Але Swift добре впорався з особливостями реального світу: аеродинамічною турбулентністю, розмиттям камери і перепадами освітленості — все це здатне спантеличити системи, навчені слідувати заздалегідь розрахованій траєкторії.
На практиці така навігаційна система допоможе рятувальникам шукати людей у палаючих будинках і, наприклад, проводити інспекції великих споруд, у тому числі кораблів. Так космічні роботи NASA вже допомагають боротися з пожежами і стихійними лихами.
В основі амортизувальної конструкції робота лежить принцип побудови геодезичних куполів. Дослідники NASA вдосконалили конструкцію мережею з розтяжок і демпферів, тим самим забезпечивши рівномірний розподіл навантаження від удару під час приземлення робота на тверду поверхню. Ба більше, тросами в розтяжці можна керувати — таким чином робот здатен перекочуватися у потрібному напрямку.